[2023-03-30] 1. 자율주행 자동차 기술
자율주행 자동차
- 자율주행 자동차는 인공지능, 빅데이터, 초연결을 합친 4차 산업혁명의 아이콘이라고 할 수 있음
자율주행 6단계
- 자율주행의 단계는 레벨 0부터 레벨 5까지로 나눌 수 있음


- Level 0(비자동화) : 자율주행 시스템이 없음, 운전자가 차량을 완전히 제어해야 하는 단계
- Level 1(운전자 보조) : 방향 및 속도 제어 등 특정 기능의 자동화, 운전자는 차의 속도와 방향을 항상 통제
- Level 2(부분 자동화) : 고속도로와 같이 정해진 조건에서 차선과 간격 유지 가능, 운전자는 항상 주변상황을 주시하고 적극적으로 주행에 개입
- Level 3(조건부 자동화) : 정해진 조건에서 자율주행 가능, 운전자는 적극적으로 주행에 개입할 필요는 없지만 자율주행 한계 조건에 도달하면 정해진 시간 내에 대응해야 함
- Level 4(고도 자동화) : 정해진 도로 조건의 모든 상황에서 자율주행 가능, 그 밖의 도로 조건에서는 운전자가 주행에 개입
- Level 5(완전 자동화) : 모든 주행 상황에서 운전자의 개입 불필요, 운전자 없이 주행 가능
자율주행 프로세스

-
인지
- 고정 지물 인식 및 경로 탐색
- 차로, 차선, 횡단보도, 터널, 고가 등
- 변동 지물 및 이동 물체 인식
- 차량, 보행자, 신호등, 사고 차량 등
- 고정 지물 인식 및 경로 탐색
-
판단
- 주행 상황 판단 및 주행 전략 결정
- 차선 변경, 추월, 좌/우 회전, 정차 등
- 주행 경로 생성
- 목표 궤적, 목표 속도, 전방 타깃 정하기
- 주행 상황 판단 및 주행 전략 결정
-
제어
-
판단을 내린 만큼 차량을 제어
- 목표 조향각/토크 맞추기, 목표 가감속 맞추기
-
자율주행SW가 운전하는 방식
- 보다 정확한 지도가 필요
- 지도에서 자기의 현재 위치 알아내기 - GPS, 영상 매칭, 라이다 매칭
- 목적지까지 경로 찾기
- 주변 살피기 - 각종 센서
- 상황에 맞게 속도 조정, 핸들 꺾기
- 경로 그대로 따라가기 (차선 준수)
- 교통 신호 따르기
- 예외 상황에 대처(추월 및 정차)
- 돌발 상황에 대처(급브레이크 및 장애물 피해가기)
고정밀 지도(HD Map, High Definition Map))
- 기존 네비게이션 지도 보다 정밀한 지도 (10 ~ 20 센티 정밀도 제공)
- 다양한 부가정보 포함
- 차선 정보
- 가드레일
- 도로 곡률, 경사
- 신호등 위치
- 교통 표식
- 벡터맵

- 포인트맵

- 벡터맵 + 포인트맵

고정밀 지도의 제작
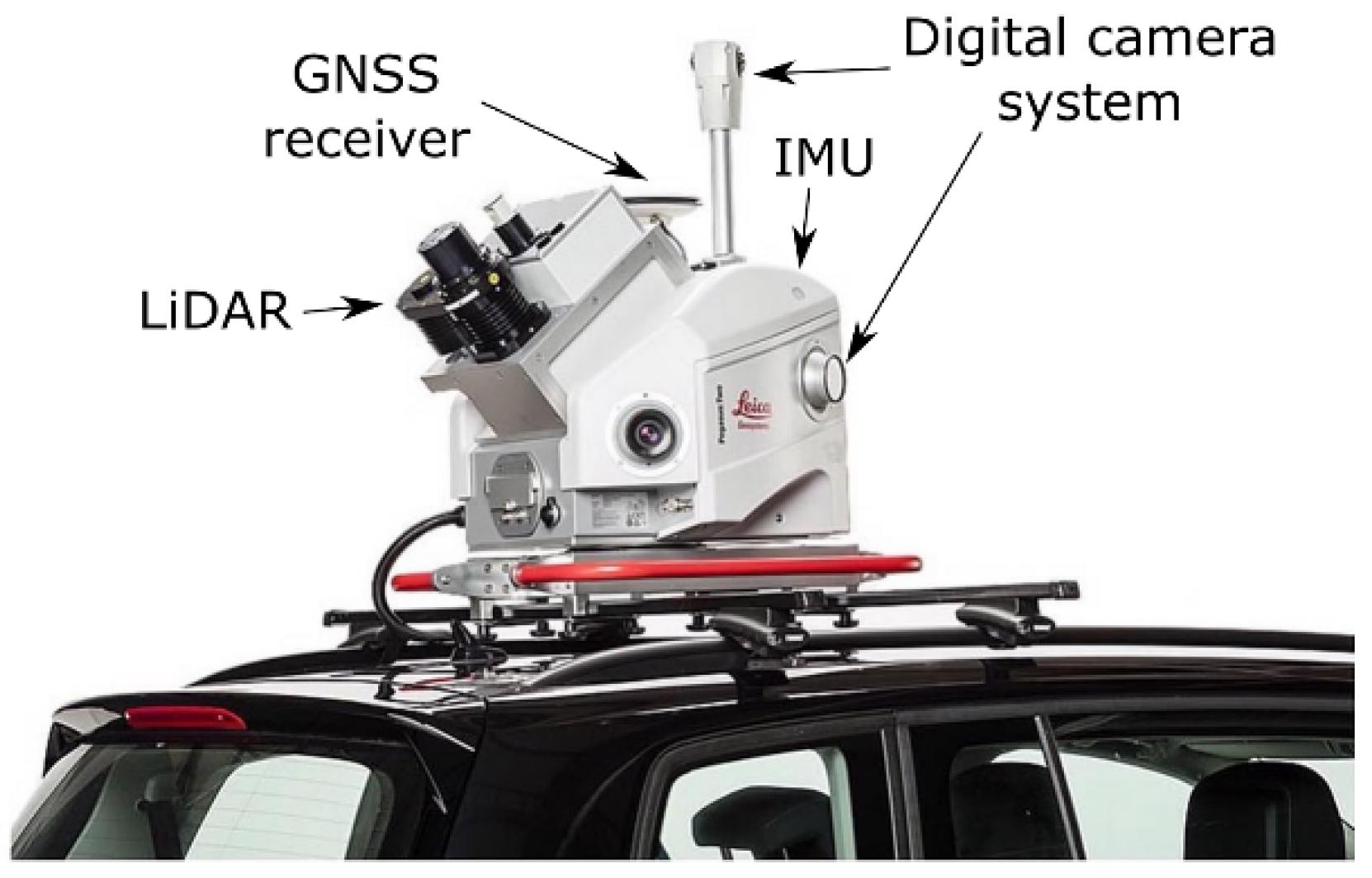
- MMS(Mobile Mapping System)
- 이동 차량에 탑재된 다양한 센서 및 카메라를 이용하여 주변 환경의 고정밀 지도 및 위치 정보를 수집하는 시스템
- 데이터를 수집한 다음, 후처리 작업을 통해 지도 제작.
- 제작 순서
-
현장 조사 : MMS(LIDAR)를 이용하여 Point Data 수집
-
Data 처리 : 데이터 후처리 및 LAS(LIDAR data exchange format, LIDAR 데이터를 저장하고 교환하기 위한 표준 파일) 데이터 변환
-
Map 구축 : 곡률, 경사도 정보 추출 및 객체(신호등, 표지판 등) 추출
-
Data 접수 : 데이터 오류 검수 및 검증
-
App Map : ADAS/HD Map 변환 생성
자율주행 단계별 요소 기술

Localization 기술

-
정밀 지도와 연동하여 차량의 현재 위치 파악
- 라이다, 카메라를 이용해 지도의 어느 위치에 있는지?
e.g. 지도의 표지판과 라이다/카메라로 인식한 표지판 비교
-
위 사진의 파랑 점이 MMS로 제작한 정밀 지도에 표시된 랜드마크(나무, 건물, 가로등 등) 포인트, 주황색 점이 라이다의 포인트
- 파랑색 점과 주황색 점이 거의 일치해야 함
- 그림의 경우 위치가 오른쪽이 아닌 왼쪽에 있어야 잘 주행하는 것 (보라색의 선만큼 오른쪽에 치우침)
- 이런 것을 알아채고 보정하는 작업을 Localization 기술이라 할 수 있음
-
GPS를 이용하면 되는 것 아닌가?
- 정말 좋은 데이터지만, 정확하지 않음(오차가 크면 5m 까지 차이남)
- GPS를 처음에 기준을 잡고 대강의 위치를 파악할 때 사용하고 정밀한 위치는 라이다, 카메라와 정밀 지도를 이용함
Global Path Planning(Route Planning)
- 목적지까지 경로 찾기
- 중간 목적지 또는 최종 목적지까지 경로
- 교차로에서 행위도 결정해야 함
Object Dectection
-
주변 차량, 보행자, 오토바이, 자전거를 인식
-
신호등은?
- 신호등의 위치는 지도에 이미 입력되어 있으므로 영상을 전체를 확인할 필요가 없음
- 신호등이 보이는 곳의 위치에 도달했을 때 카메라로 그 때의 그 특정 위치의 신호등의 불을 확인
Object Tracking
- 각 오브젝트에 고유 ID를 부여하여 추적, 예상되는 주행 경로를 예측

지도 상에서 오브젝트 인식과 추적

Local Path Planning(Trajectory Planning)
- 다음 이동할 곳으로의 경로 찾기 (충돌 회피 고려)
- 여러 개의 후보 경로를 확보
- 끊임 없이 후보 삭제, 신규 후보 등록 작업을 반복
- 실시간성이 중요(타임을 맞춰서 제 때 무언가를 해야 함) -> 시스템 최적화 필요

Behavior Selector
- 행위 결정
- 운전 의사결정
- 운전 방법, 성향
Local Path Following(Trajectory Following)
- 경로 따라 차량을 운전하기
- Pure pursuit 알고리즘
- 차량의 현재 위치를 결정함
- 차량에서 가장 가까운 경로 상의 점을 찾음
- 목표점을 찾음
- 곡률을 계산하고 해당 곡률로 차량의 방향을 업데이트 함
- 차량의 위치를 업데이트 함
Vehicle Control
- 주행 제어
- 원하는 대로 차량을 움직이게 만들기
자율주행 통합 플랫폼 Autoware
- 오픈소스 자율주행 통합플랫폼
- SAE Level 2
- 실차에 적용 가능한 솔루션
- 30개 이상의 국가, 100개 이상의 회사, 20개 이상의 차량 모델에 탑재

